在上一篇筆記中,我們初步搭建了ROS開發環境。本篇將聚焦于如何使用輕量級且強大的Visual Studio Code (VSCode) 來開發一個簡單的ROS Python節點,并探討其在計算機軟硬件開發中的典型應用場景。
一、 開發環境準備
- 確保基礎環境:已安裝并正確配置ROS(如Melodic或Noetic版本),且能正常運行
roscore。 - 安裝VSCode:從官網下載并安裝VSCode。
- 安裝關鍵插件:在VSCode擴展商店中搜索并安裝以下插件,它們能極大提升ROS開發效率:
- ROS (by Microsoft):提供ROS工作區檢測、消息定義查看、節點啟動等核心功能。
- Python (by Microsoft):提供Python語言支持、調試、智能提示。
- CMake Tools (可選,用于C++開發):如果你也進行C++開發,此插件非常有用。
二、 創建一個簡單的ROS Python程序
我們將創建一個發布者(publisher)節點,周期性地向一個話題(topic)發布消息。
1. 創建工作空間與功能包(如已存在可跳過):
`bash
mkdir -p ~/catkinws/src
cd ~/catkinws/src
catkincreatepkg myvscoderosdemo rospy stdmsgs
cd ~/catkinws
catkinmake
source devel/setup.bash
`
2. 用VSCode打開工作空間:
`bash
code ~/catkin_ws
`
首次打開,VSCode的ROS插件通常會自動識別ROS工作空間并提示加載。
3. 編寫Python節點:
在src目錄下的功能包my<em>vscode</em>ros<em>demo中,創建一個scripts文件夾(存放Python腳本的慣例),然后新建文件simple</em>publisher.py。
`python
#!/usr/bin/env python3
import rospy
from std_msgs.msg import String
def talker():
# 初始化節點,節點名稱為'talker'
rospy.initnode('talker', anonymous=True)
# 創建一個Publisher,發布到'topicdemo'話題,消息類型為String,隊列長度為10
pub = rospy.Publisher('topicdemo', String, queuesize=10)
# 設置發布頻率為1Hz
rate = rospy.Rate(1)
count = 0
while not rospy.is_shutdown():
# 準備要發布的消息內容
hellostr = "Hello ROS from VSCode! Count: %d" % count
rospy.loginfo(hellostr) # 在終端打印日志信息
pub.publish(hello_str) # 發布消息
rate.sleep() # 按照設定頻率休眠
count += 1
if name == 'main':
try:
talker()
except rospy.ROSInterruptException:
pass
`
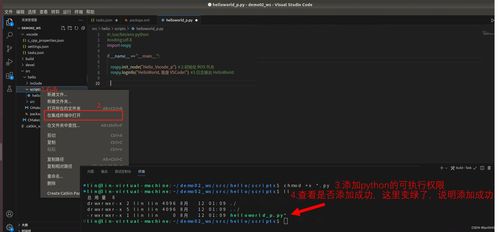
4. 設置文件權限(在終端中):
`bash
cd ~/catkinws/src/myvscoderosdemo/scripts
chmod +x simple_publisher.py
`
- 在VSCode中運行與調試:
- 運行roscore:可以打開VSCode內置終端(
Ctrl+),運行roscore`。
- 運行節點:在另一個終端中,確保已
source devel/setup.bash,然后直接運行rosrun my<em>vscode</em>ros<em>demo simple</em>publisher.py。你將看到每秒輸出一條日志。
- 使用ROS插件運行:VSCode左側活動欄的ROS視圖可以列出所有節點,部分插件支持右鍵直接運行節點。
- 調試:利用VSCode強大的Python調試器,可以設置斷點、單步執行、查看變量,極大方便了復雜邏輯的調試。
三、 在計算機軟硬件開發中的應用簡析
這個簡單的例子背后,體現了ROS在復雜計算機軟硬件系統開發中的核心價值:
- 軟件層面 - 分布式與模塊化:
- 進程解耦:發布者(
talker)和(未來可創建的)訂閱者(listener)是完全獨立的進程,通過話題(topic_demo)進行異步通信。這種松耦合設計使得各個功能模塊可以獨立開發、測試、部署和復用。
- 語言中立性:發布者用Python編寫,訂閱者完全可以用C++、Java等編寫,ROS中間件負責處理跨語言通信。這允許開發者為不同模塊選擇最合適的編程語言。
- VSCode作為統一IDE:提供代碼編輯、項目管理、版本控制(Git集成)、調試一體化環境,提升了復雜軟件項目的開發效率。
- 硬件層面 - 抽象與集成:
- 硬件抽象層:在真實的機器人系統中,
simple<em>publisher.py發布的數據可能來源于一個具體的硬件傳感器(如激光雷達、攝像頭)。ROS提供了各類傳感器的驅動包,將這些硬件數據統一封裝成標準的ROS消息格式(如sensor</em>msgs/LaserScan),向上層應用提供了一致的接口。
- 硬件控制:反之,一個訂閱控制命令的節點,可以將收到的
geometry_msgs/Twist類型消息(包含線速度和角速度),通過ROS驅動包轉換成具體的電機驅動指令,從而控制底盤運動。
- 仿真與實機無縫切換:利用Gazebo等仿真工具,可以在沒有物理硬件的情況下,使用完全相同的ROS話題和消息接口進行算法開發與測試(軟件在環)。驗證通過后,只需切換話題的數據來源(從仿真器到真實傳感器驅動),即可部署到真實機器人(硬件在環),這極大地保護了硬件并加速了開發周期。
通過VSCode開發一個簡單的ROS Python節點,我們不僅熟悉了基礎的開發流程,更重要的是,可以管中窺豹,理解ROS如何通過其通信機制(話題、服務、動作等)將復雜的機器人系統拆分為多個可獨立管理的模塊。這種架構完美契合了現代計算機軟硬件協同開發的需求:軟件上追求高內聚、低耦合和高效開發調試;硬件上追求標準化接口、快速迭代和仿真驗證。掌握VSCode與ROS的結合,將為機器人、自動駕駛、物聯網等領域的軟硬件系統開發提供強大助力。
---
下一步建議:嘗試創建一個訂閱topic_demo話題的訂閱者節點,并使用VSCode的調試功能觀察消息傳遞過程。